Рассчитаем среднюю квадратическую ошибку измерения углов и расстояний при полярном способе съемки, если ошибка положения точки 1 задана и равна Мр.
В полярной системе координат ошибка положение точки выражается формулой:
 (35)
(35)
где
По принципу равных влияний имеем:
откуда
Пусть масштаб съемки 1:М=1:2 000, тогда Мр==0.5 мм * 2 000=1 м. При
S=100 м вычисления по формулам (37) дают
Способ перпендикуляров. Способ перпендикуляров является реализацией обычной прямоугольной системы координат. Пусть линия АВ - одна из сторон теодолитного хода. Примем ее за ось 1, начало координат совместим с пунктом А; ось d расположим перпендикулярно линии АВ. Положение точки 1 определяется двумя перпендикулярами 11 и dl (рис.10), длины которых измеряют мерной лентой или рулеткой.
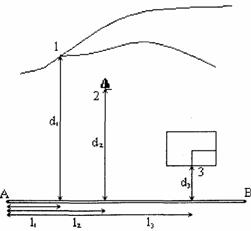
Рис.10
Для построения прямого угла β можно применить теодолит или эккер; иногда угол β= 90о можно построить на глаз. Положение точки 1 на плане получают после выполнения трех операций: откладывания вдоль линии АВ длины перпендикуляра 11, построения угла β= 90о с помощью транспортира, откладывания на стороне угла β длины второго перпендикуляра dl.
Съемка других точек и определение их положения на плане выполняются в таком же порядке.
Ошибка положения точки Мр в способе перпендикуляров складывается из ошибки измерения перпендикуляра 1, ошибки построения (или измерения) угла β= 90о и ошибки измерения перпендикуляра d:
По принципу равных влияний полагаем: